Wireless Haptic Glove using Nitinol as a Force Feedback Actuator
Michael Efraimidis
Type: Publication
Supervisor: Prof. Katerina Mania
Research Domains: Shape Memory Alloys, Nitinol, Augmented Reality
Abstract
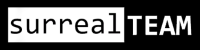
Contemporary haptic devices rely heavily on motors for haptic feedback which have significant volume and weight constraints, limiting the user’s range of motion and mobility. This paper presents a significantly less cumbersome system in the form of a haptic glove for force feedback by using nitinol-based actuators which act as muscles by contracting and expanding via controlled heat activation. Force feedback is applied through each fingertip via strings. Our system mimics the musculoskeletal structure of the hand by stretching nitinol springs in the forearm. The actuators embedded in the glove are controlled via a microprocessor communicating with an Augmented Reality Head Mounted Display. An efficient cooling methodology includes a DC fan targeting flexible porous bellows which cool down the nitinol-based components. A formal psychophysical evaluation explores the impact of the proposed feedback on user perception.